



Samuel Fabian
Robber flies are aerodynamic aerobatics, capable of identifying their prey, dodging obstacles, and capturing small insects at high speeds in mid-flights. Scientists have taken a closer look at how robber flies manage this amazing feat despite having brains equal to one grain of sand. according to new paper Published in the Journal of Experimental Biology, flies combine two distinct strategies for feedback-based locomotion: one that involves intercepting prey when the scene is clear, and one that allows flies to swerve around any obstacles in their flight path.
One challenge in robotics is how to design robots that can navigate crowded environments—something humans and other animals can instinctively do every day. According to the authors, many robotic systems rely on some kind of path planning: using sound (sonars) or lasers to send signals and then detecting reflections. This data can then be used to create a distance map of the ocean.
But compared to using simple visual cues (eg ‘interactive methods’), route planning is an energy costly approach. Humans and other animals do not need detailed maps or specific knowledge about a target’s location, speed, and other details. We simply react to any relevant stimuli in our environment in real time. Hence, the creation of navigational behavioral algorithms based on biological systems is of great interest to robotics.
Previous studies have focused on the ability of different species, including fruit flies and pigeons as well as humans, to handle crowded environments. “However, in these cases, obstacle avoidance was the only objective,” the authors wrote. “Navigating around an obstacle is more difficult when a specific location serves as a target, because obstacle aversion must be balanced by the navigational objective.”
That’s why bioengineer Samuel Fabian of Imperial College London and three collaborators from the University of Minnesota decided to conduct their own experiments using the predatory robber fly (Holocephala fusca) as a test subject. Robber flies were chosen because of their highly predictable interception trajectory to catch prey. The authors also wrote that its small size and relatively fast behavior (most flights take less than a second) “require rapid reactions with minimal computational effort”.
Fabian et al. He likened the behavior of the thief fly in hunting to the behavior of hawks, hawks and modern guided missiles. Usually flies catch thieves by sitting somewhere that gives them a clear view of the sky. Once a robber fly detects potential prey and begins to chase it, the fly must navigate to trap the prey and avoid any obstacles along the way, such as stray branches.
The thief flies were presented with a moving target in the form of a small silver-colored reflective bead that was pulled along a clear fishing line with reels and a stepper motor. “The flies really didn’t know they weren’t real prey, even when they were so close.” Fabian said. “If something is small enough, they seem to assume it’s food in general.”
The frame also includes a hitch: an acetate tape coated with black acrylic paint, either a thin (2.5 cm) or thick (5 cm) version, which is placed just below the target’s track. “The precise positioning of the tape and the initial trajectory of the fly determine whether the object has become an obstacle in the flight path and whether it is obscuring the target,” the authors wrote.
The researchers recorded all flights under field conditions to obtain the most natural behaviour. Next, they digitally reconstruct 26 flights of thief flies chasing the moving bead in the presence of an obstacle. Maneuvering overhead equipment tends to excite flies, so those 26 flights represent the flies that have remained on their perch as the device has been placed around rather than flying away.
Results: In the absence of an obstacle, thief flies maintained the same line of sight to the bead throughout its approach in order to trap and capture its prey. When a thin or thick black bar partially obscured view for brief periods (<0.1 sec), the flies engaged in evasive maneuvers to get around the obstacle before returning to their trajectory to intercept. Sometimes the fly deflects in response to a black bar even when the bar does not obscure its line of sight. And when the researchers blocked the flies' line of sight for longer than 0.1 seconds, the flies would abandon interception altogether.
Fabian and others. He concluded that the robber flies were using a simple obstacle avoidance strategy in combination with the standard intercept strategy, which they called co-routing. “The faster the obstacle grows in their field of vision, the further away they will be,” Fabian said. The flies return to the interception path as soon as the aforementioned obstacle begins to recede from view. “They pay attention to their surroundings even when they are focused on the target.”
The authors wrote that this “shows that obstacle avoidance can be a product of simple feedback laws that do not require absolute knowledge of distance, volume, or speed,” in line with previous work showing that simple feedback laws can also explain flies’ intercept strategy. This is certainly based on a limited number of field trials, and the team hopes to conduct more trials in the future.
DOI: Journal of Experimental Biology, 2022. 10.1242 / JP 243568 (About DOIs).

“Extreme travel lover. Bacon fanatic. Troublemaker. Introvert. Passionate music fanatic.”
More Stories
WWE SmackDown Spoiler Lineup for Episode 4/19/24
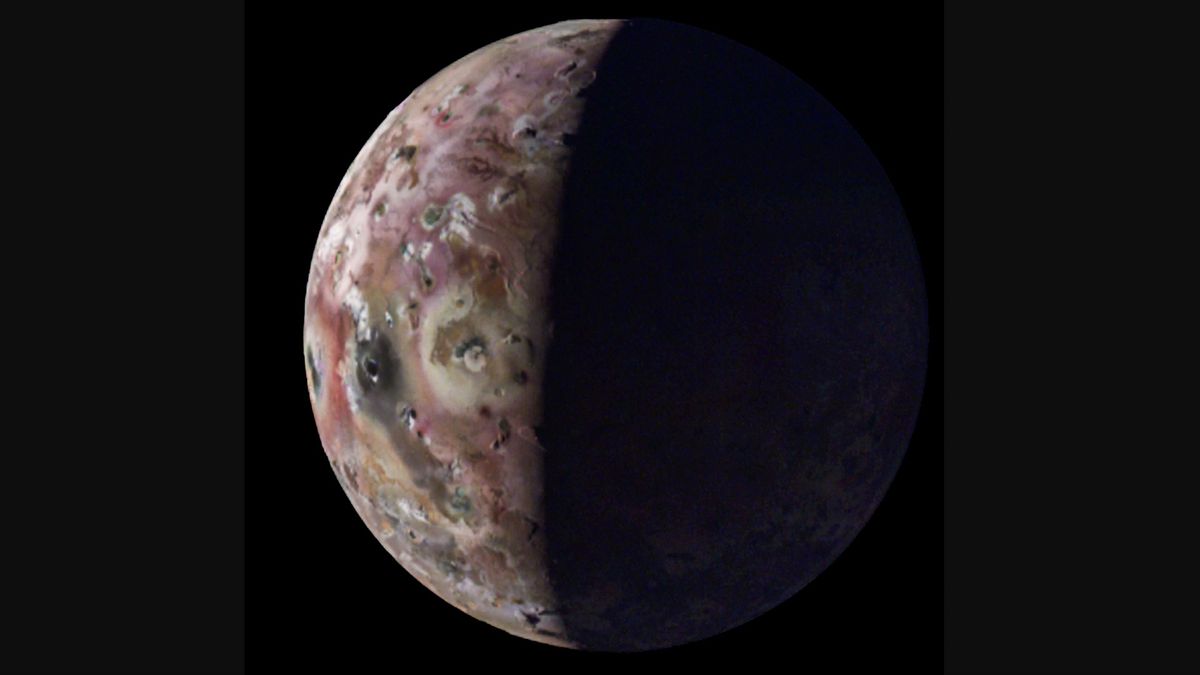
NASA's Juno probe captures stunning views of Jupiter's volcanic moon Io (video)
110% Thinking Outside the Box – Thinking Game Review, Quiz, Criticism